机器人的手臂是程序控制的吗?怎么做?
我只是一知半解。今天终于第一次在百科上看到了关于机器人的问题。是的,这是一个看起来并不热的话题,但是其他技术非常丰富,会吸引很多人的关注。对于这类问答,我就用我所知道的在这里漫谈一下。

机械臂只是工业机器人装置的一个简单分支。见下图。
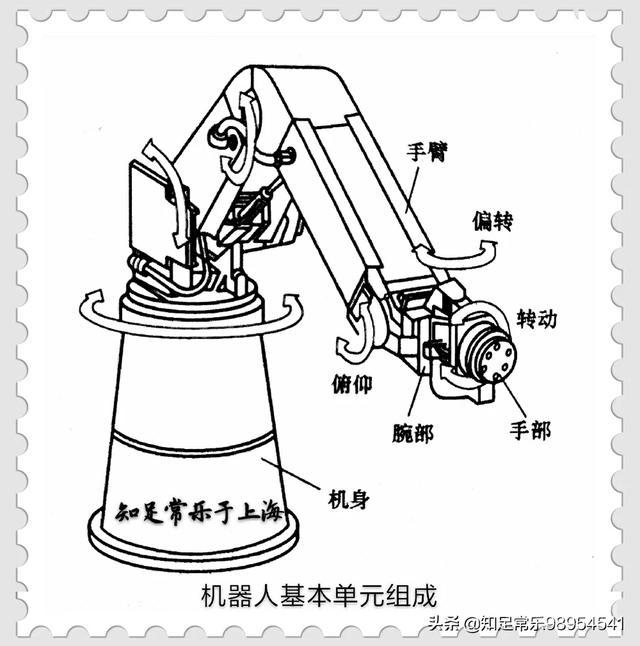
机器人的机械手(机械体)由手、腕、臂、金属柱和辅助行走机构组成。包括上下、左右旋转。
“手臂”只是一个重要的握持部件,支撑着被抓握的物体、手和手腕,并驱动手指抓取物体,按照预定的要求将其搬运到指定的位置。工业机械手的手臂通常由驱动手臂运动的部件(如液压缸、气缸、齿轮齿条机构、连杆机构、螺旋机构和凸轮机构等)组成。)和驱动源(如液压、气压和电机等。)来实现手臂的各种动作。为了防止手臂绕其轴线旋转,在手臂拉伸和抬起时,必须有一个导向装置,以确保手指沿正确的方向移动。此外,导向装置还能承受手臂转动时手臂的弯矩和扭矩以及启动和制动瞬间产生的惯性矩,使运动部件受力状态简单。
手臂运动的目的是将手送到空之间运动范围内的任意一点。如果想改变手的姿势(方位),可以用手腕的自由度来实现。所以一般来说,手臂有三个自由度,满足基本要求,也就是手臂情况分析。它在工作中承受腕部、手部和工件的静态和动态载荷,自身运动较为复杂。因此,机械臂的结构、工作范围、灵活性、抓取重量和定位精度直接影响机械臂的工作性能。
手臂的各种运动通常由驱动机构(如液压缸或气缸)和各种传动机构来实现。根据对手臂的受力分析,它在工作中承受着腕部、手部和工件的动、静载荷,自身的运动较为复杂。因此,机械臂的结构、工作范围、灵活性、抓取重量和定位精度直接影响机械臂的工作性能。
下图是机器人的组成。
机器人的结构由机械本体、外围辅助机械装置、CPU芯片处理器、传感器(包括视觉传感器)、各种驱动器和输入/输出系统组成。它们需要完成一系列的动作,这些动作都是由CPU处理器完成的。这里必须由系统软件程序来完成。所以,没有系统软件程序,就成了一堆废铁。
至于提问者说的,这样做?我只是在笑,很难开口。它涉及到很多方面,没有经过系统的研究,简直就是天方夜谭。设计机器人是一个复杂的系统工程,是一个团队和很多辅助工厂合作的结果。
在机器人应用领域,日本、美国等。一直走在世界前列,中国只是世界上需要机器人的一个大市场。由于国家战略和企业转型升级的需要,这方面的人才太少。否则,在工信部规划的十三五规划中,到2020年,工业机器人密度将达到每万名员工100台以上。所以现在选择学机器人的同学都是相当不错的高科技专业,就业前景很好。可以果断地说,未来十年,工业机器人将是一个看不到“天花板”的行业。
至于机器人,我只知道皮毛。在此,如果提问者还年轻,建议他/她重新学习,将来在机器人方面大显身手,造福人类。
以上观点为个人观点,仅供大家娱乐。
2019年7月6日长乐在上海。